Opis projektu
Robot ten o imieniu "Tuptus" :) w raz z oprogramowaniem do tworzenia mapy budynku miał być moją pracą magisterską, ale ponieważ nie znalazł promotora, więc stał się tylko miłą zabawką. (Każdy elektronik powinien kiedyś zbudować własnego robota :) )
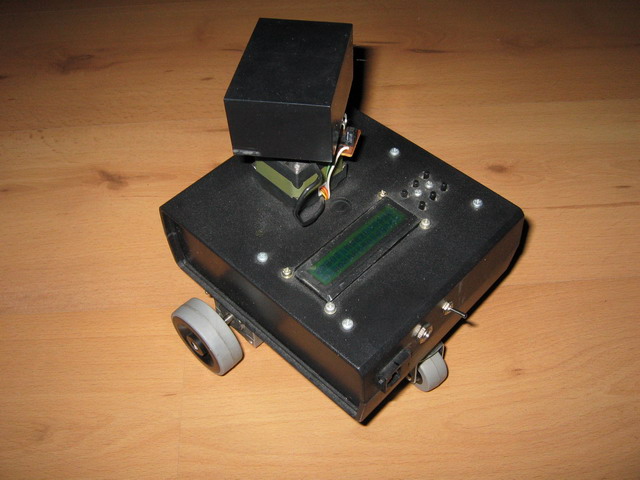
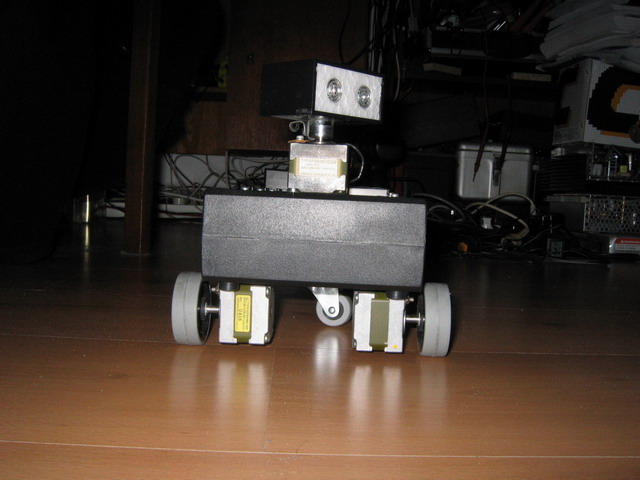
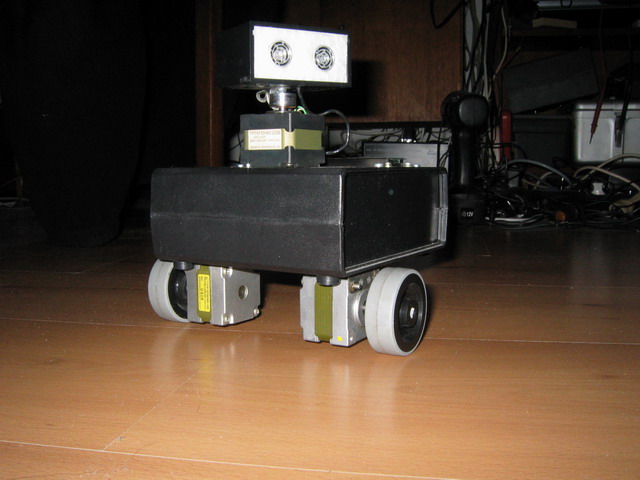
Robot został zbudowany w oparciu o system mikroprocesorowy z mikrokontrolerem AT89C51, 32KB RAM (będąca zmapowaną także jako ROM), 8KB ROM. Robot po włączeniu oczekuje na wgranie oprogramowania przez port RS232 w postaci pliku HEX, a następnie robi skok pod adres 8000h. Sterownik silników krokowych jest zmapowany w przestrzeni adresowej i do sterowania wymaga przesyłania sekwencji bitów do przełączania kolejnych uzwojeń silników krokowych pozyskanych ze starych stacji dyskietek 5.25. Do orientowania się w przestrzeni wykorzystano ultradźwiękowy czujnik odległości zamocowany w obracanej głowie robota. Niestety elektronika do czujnika nie została jeszcze wykonana więc robot jest ślepy, ale jak projekt wróci do łask (czytaj będę miał trochę wolnego czasu) to i ta cześć projektu zostanie wykonana. Robot, ku uciesze widzów potrafi poruszać się we wszystkich kierunkach zgodnie z zaprogramowanym algorytmem. Poniżej kilka fotek.





Status: Wstrzymany