Opis rotora.
Wszyscy narzekają na dokładność działania rotora firmy CONRAD oraz szybkie gubienie synchronizacji. Przyczyna tego jest to ze rotor wykorzystuje silniki synchroniczne i bez żadnej kontroli zakłada ze oba kręcą się w takim samym tempie. Niestety ponieważ na rotorze zwykle zainstalowana jest antena o określonej bezwładności silnik rotora wolniej się rozpędza co powoduje, że momenty startów i hamowań powoduje rozsynchronizowanie się sterownika z rotorem. Aby rozwiązać ten problem należało by do rotora domontować dekoder obrotów. Poniżej kilka schematów i zdjęć konstrukcyjnych.
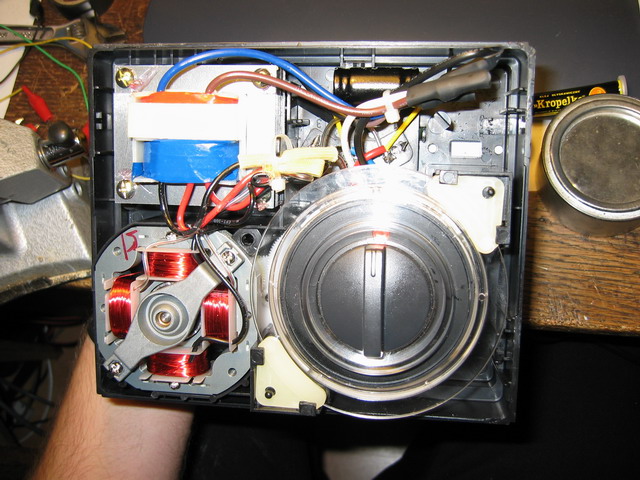
Oryginalny sterownik.
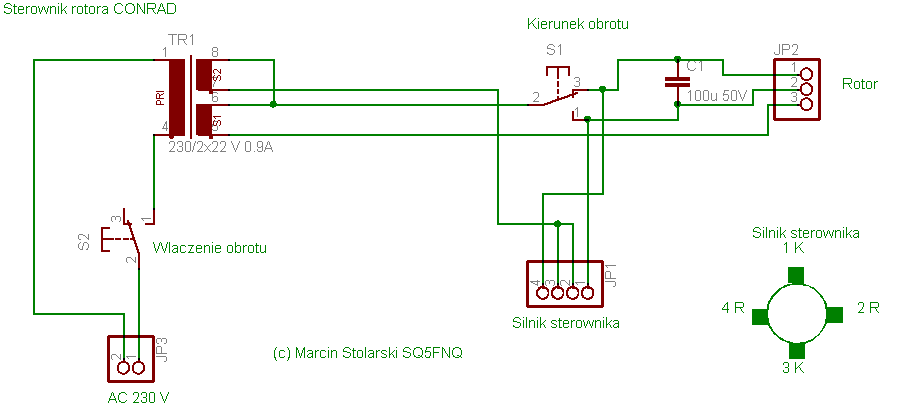
Schemat oryginalnego sterownika.
Nie jestem pewien połączeń w transformatorze ponieważ na wyjściu są tylko 3 przewody i uzwojenia mogą być połączone też w szereg, ale nie ma to dużego znaczenia.
Działanie oryginalnego sterownika
Gdy przekręcimy gałkę sterownika załączamy oba przełączniki co powoduje obracanie się rotora oraz płytki pod gałka. Kiedy płytka ustawi się w pozycji gałki oba przełączniki są rozłączane i silniki się zatrzymują.
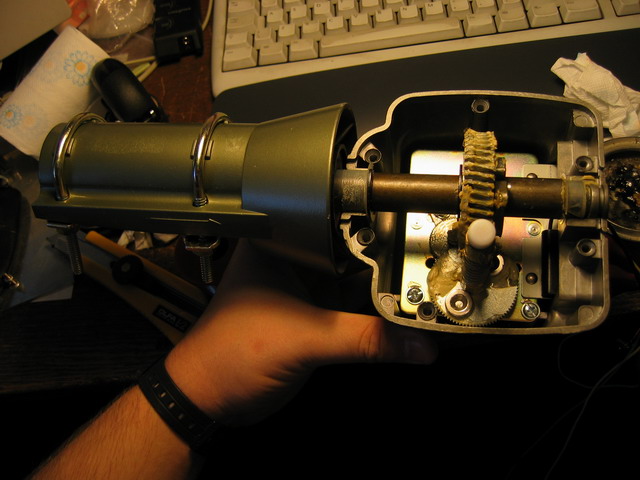
Dekoder obrotów rotora.
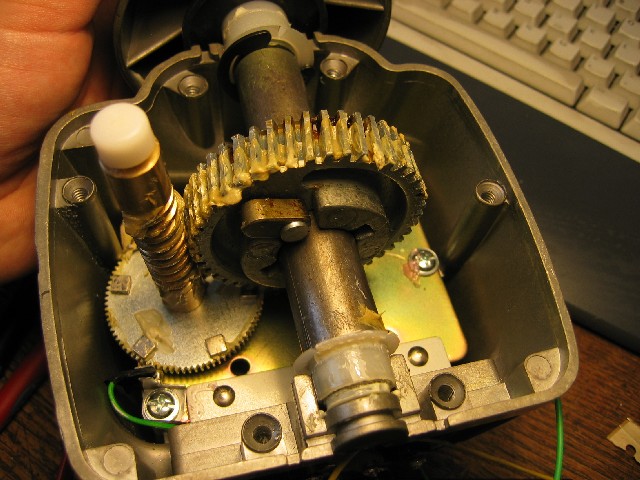
Przetrenowałem różne sposoby dekodowania obrotów w rotorze i moim zdaniem najlepiej jest to zrobić przyklejając (znaczy pole magnetyczne je przyklei) do zębatki ze slimacznicą 6 magnesów. Magnesy należy przykleić naprzemiennie polem (NSNSNS; co drugi magnes jest do góry nogami; stosowałem magnesy neodymowe 5x5x2mm oraz okrągłe 10x5mm). Następnie w płaszczyźnie zębatki umieszczamy kontaktron (czym mniejszy tym lepszy). Naprzemienne ułożenie pola magnesów spowoduje ze kontaktron będzie zwierał przy magnesie a rozwierał pomiędzy magnesami. Sterownik zlicza przejścia pomiędzy 0 a 1 (i odwrotnie) co daje 12 impulsów na obrót kolka i 504 impulsy na pełny obrót rotora. W ten sposób uzyskujemy dokładność położenia lepszą niż 1 stopień. Samo sterowanie odbywa się z dokładnością 1 stopień i uwzględnia bezwładność rotora.


Jak to wygląda w ruchu można zobaczyć na filmie.
Podczas mocowania kontaktrona należy uważać na jego szklana obudowę (bardzo łatwo ja potłuc). Istotne jest też to żeby miejsce styków wewnątrz kontaktrona było jak najbliżej płaszczyzny obrotu magnesów gdzie są największe zmiany pola magnetycznego. Najlepiej jak by kontaktron zamocować w poprzek kołka a nie prostopadle tak jak jest na zdjęciach.
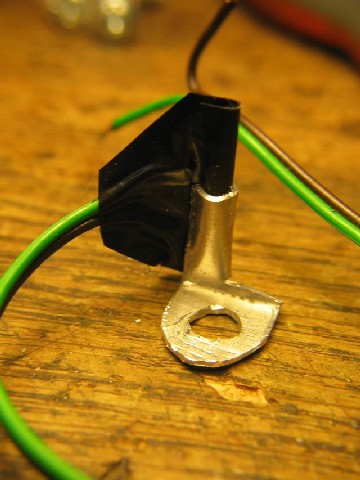

Kontaktron należy podłączyć pomiędzy zaciski 3 i 4 rotora. Zacisk 4 można pozyskać ze sterownika oryginalnego, albo samemu wykonać jak na rys poniżej.


Rotor posiada mechaniczna blokadę która uniemożliwia mu przejście przez azymut 0. Przy pracy satelitarnej jest to niewygodne ponieważ przejście satelity przez 0 wymaga odwrócenia rotora co zajmuje około 70 sekund. Można teoretycznie usunąć blokadę ale narażamy się w tedy na możliwość uszkodzenia przewodów antenowych poprzez nawiniecie i naciągniecie ich na maszt przy wielokrotnych obrotach. Jeśli ktoś ma pomysł na blokadę mechaniczną zapewniającą półtora obrotu rotora niech da znać. Na razie wprowadziłem rozwiązanie programowe. Kiedy sterownik dostaje polecenie np. AZ=390 i EL=10 przechodzi w tak zwany tryb REVERSE i wykonuje jedynie odwrócenie tyłem oraz przekłada antenę przez zenit. AZR=AZ-180=190 ELR=180-EL=170. Taka operacja zajmuje już tylko 45 sekund. Kolejnym programowym rozwiązaniem jest graniczna synchronizacja. Jeśli rotor oprze się o ogranicznik mechaniczny, sterownik uzna ze to błędy synchronizacji i i automatycznie aktualizuje bieżące położenie rotora dla AZ będą to wartości 000 oraz 360. Dla EL bedą to wartości 000 i 180.

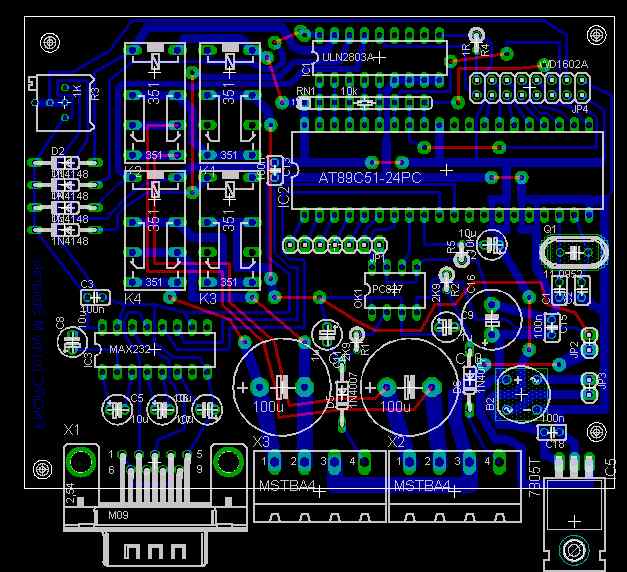
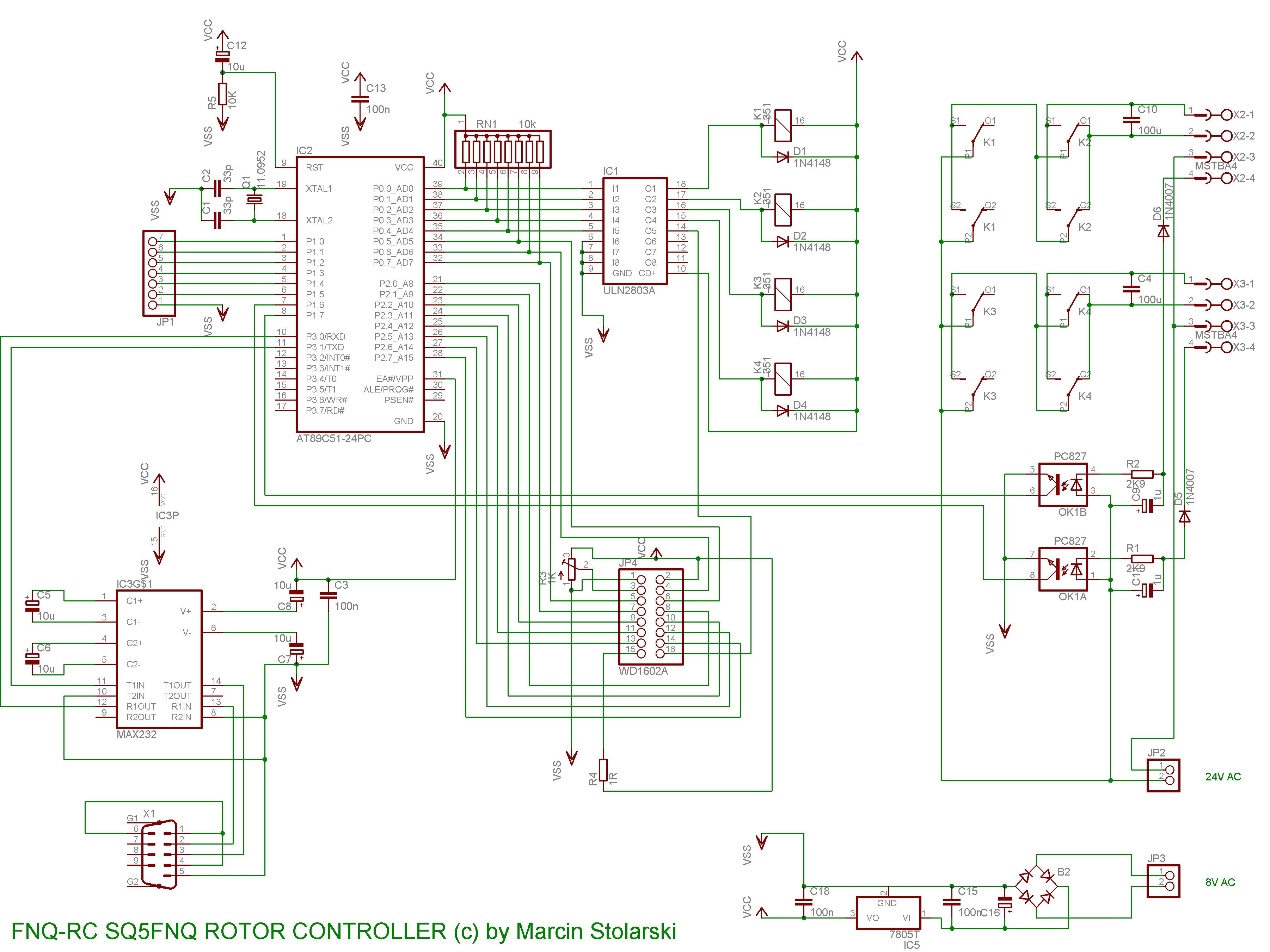
Sterownik elektroniczny.
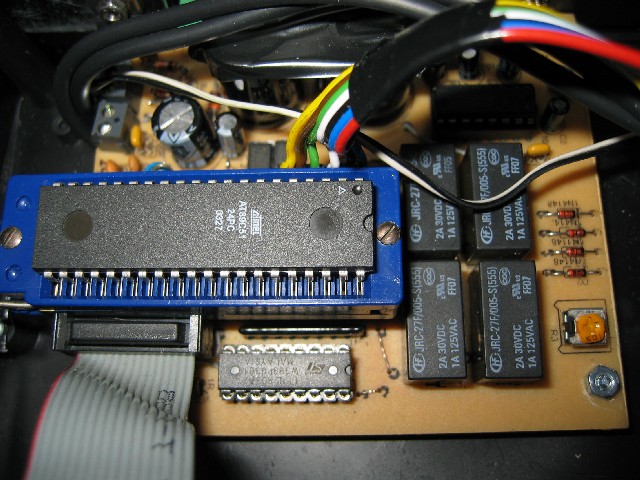
Ponieważ jakoś nikt nie zgłosił się ze zbudował elektroniczny sterownik wiec sam zakasałem ręce do roboty. Sercem jest mikrokontroler AT89C51. Posiada on dwa oddzielne (izolowane) obwody elektryczne (rotora, oraz elektroniki) sprzężone ze sobą za pomocą przekaźników oraz transoptorów.
Sterownik pozwala na ręczne sterowaniem rotorem (LEWO, PRAWO, GÓRA, DÓŁ). Dodatkowy przycisk służy do wejścia w MENU, gdzie możliwe jest zaparkowanie rotora, wyłączenie podświetlania wyświetlacza, wyłączenie obsługi sterowania przez port RS232, oraz restart kontrolera. Niestety kontroler nie posiada nie ulotnej pamięci wiec wszystkie ustawienia są kasowane po wyłączeniu rotora. Kasowane jest również położenie rotora, i po włączeniu zasilania, zalecane jest jego zaparkowanie w pozycji (0,0) aby zsynchronizować rotor ze sterownikiem. Na wyświetlaczu mamy informację o aktualnej pozycji rotora (AZ, EL) oraz pozycji na którą rotor ma się ustawić (ustawiane prze łącze RS232). Dodatkowo wyświetlają się informacje w którą stronę obraca się aktualnie rotor, oraz czy jest tryb REVERSE. Sterownik jest kompatybilny z protokołem sterownika GS-232A (to chyba najbardziej popularny sterownik firmy YAESU) i może być sterowany za pomocą takich aplikacji jak Orbitron, czy WXtoImg. Przyjmuje on komendy "Maaa" oraz "Waaa eee" wiec może służyć do do pracy z jednym rotorem poziomym jak i z dwoma rotorami w trybie satelitarnym. Sterownik komunikuje się z prędkością 9600bps.

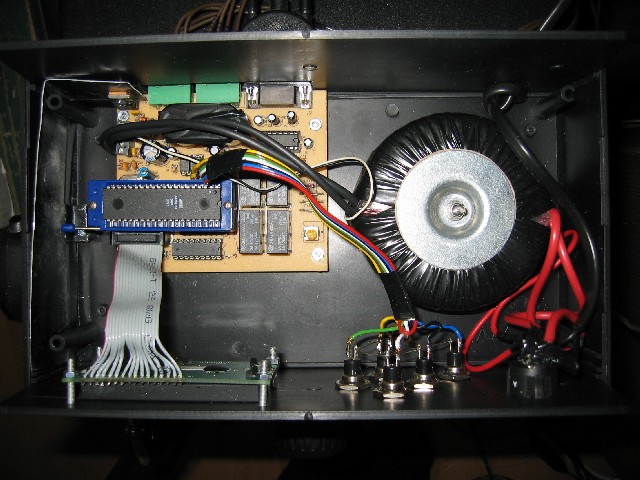
Do zasilania rotor potrzebuje dwóch napięć zmiennych (22V 2A oraz 8V 0.5A). W prototypie wykorzystałem toroid 80VA z uzwojeniem wtórnym 24V 3A na który nawinąłem dodatkowe uzwojenie dające 8V i zabezpieczyłem je taśma izolacyjną. Istotne jest to żeby były to dwa oddzielne uzwojenia aby zapewnić separacje galwaniczną części logicznej od części wykonawczej.

Sterownik łączy się z rotorami za pomocą dwóch 4 żyłowych przewodów (w moim przypadku były to 60-cio metrowe PKL-ki). Do podłączenia z komputerem wykorzystuje się kabel RS232 NULL MODEM.

Rotor mechanika.
Do pracy satelitarnej potrzebowałem rotor pozwalający na obrót w azymucie oraz elewacji. Takie rotory niestety są dość drogie i kosztują około 3500zl. Postanowiłem zbudować konstrukcje, która by zmieściła się w 1000zł Wykorzystałem do tego dwa rotory firmy CONRAD (2x189zl) do tego dwa dodatkowe łożyska (2x65zł) oraz parę rurek aluminiowych o przekroju 35mm. Koszt sterownika elektronicznego to jakieś 150zl.


Mocowanie rotora AZ jest klasyczne z dodatkowym łożyskiem zmniejszającym obciążenia w samym rotorze.


Rotor EL został zamocowany jak na obrazku poniżej. Polecam dobre mocowanie krzyżowe (poprzednia wersja z jednym cybantem nieco się chwieje na boki). Dodatkowo zastosowałem stabilizacje przewodu antenowego za pomocą PKL-ki aby pracował w dużej pętli a nie w miejscu łączeń. Stosuje kabel H1000, a on nie lubi być mocno zginany. Mocowanie takie zapewnia ruch rotora EL 180 stopni. Maszt robi za ogranicznik mechaniczny. Dodatkowo na maszcie można postawić antenę pionową, np. do okólną 2x7/8 na 145MHz. Na razie zainstalowana jest antena 5 elementów YAGI na 145 MHz oraz 15 elementów YAGI na 70cm. Docelowo będzie jeszcze jakaś antena na 2.4GHz. Całość jest podłączona wiązką przewodów H155 (KF, dookolna), H1000 (YAGI) , PKL (rotor) i RG6U (downconverter).

Bilans systemu antenowego:
145MHz = 6.2dBi
60m H1000 = -2.9dB
5 elementów YAGI = 9.1dBi
435MHz = 9.7dBi
60m H1000 = -5.1dB
15 elementów YAGI = 14.8dBi
Konstrukcja pozwala na bezproblemowa prace przez wszelkiego rodzaju amatorskie satelity, odbieranie telemetrii z cubesat-ów, prace z prędkościami 9600bps G3RUH itp.
Wyniki:
Jak konstrukcja sprawdza się w boju można obejrzeć na filmie.
A na koniec jeszcze fotka z przelotu satelity NOAA 15 który został uzyskany miedzy innymi dzięki temu rotorowi (radio FT847 "wąski" FM, program WXtoImg).
UWAGI:
Jeśli ktoś chciałby stać się beta-testerem, proszę o zgłaszanie się do mnie. Otrzymacie hasło aby dostać się do dodatkowych materiałów. (rysunek płytki, schematy oraz wsad do procesora). W zamian oczekuje lojalności :) zdjęć oraz uwag do projektu.
Galeria:
Tutaj możesz obejrzeć wykonanie tego projektu przez innych.
Pozdrawiam
Marcin
SQ5FNQ
Status: Testowanie prototypu
{kind=link}